الذكاء الاصطناعي التوليدي يُحسّن تصميم الروبوتات: قفزات أعلى وهبوط أكثر أمانًا
مقدمة
يشهد مجال تصميم الروبوتات تطوراً ملحوظاً بفضل التقدمات الأخيرة في تقنيات الذكاء الاصطناعي التوليدي (GenAI). وقد أثبتت نماذج الانتشار، مثل نموذج DALL-E من شركة OpenAI، فعاليتها في توليد أفكار تصميمية مبتكرة، سواءً من خلال توجيهات المستخدم أو بشكل مستقل. يُقدم هذا البحث، الذي أُجري في مختبر علوم الحاسوب والذكاء الاصطناعي (CSAIL) في معهد ماساتشوستس للتكنولوجيا (MIT)، نهجاً جديداً يستخدم الذكاء الاصطناعي التوليدي لتحسين تصميم الروبوتات، مُحققاً قفزات نوعية في أداء هذه الروبوتات.
منهجية البحث
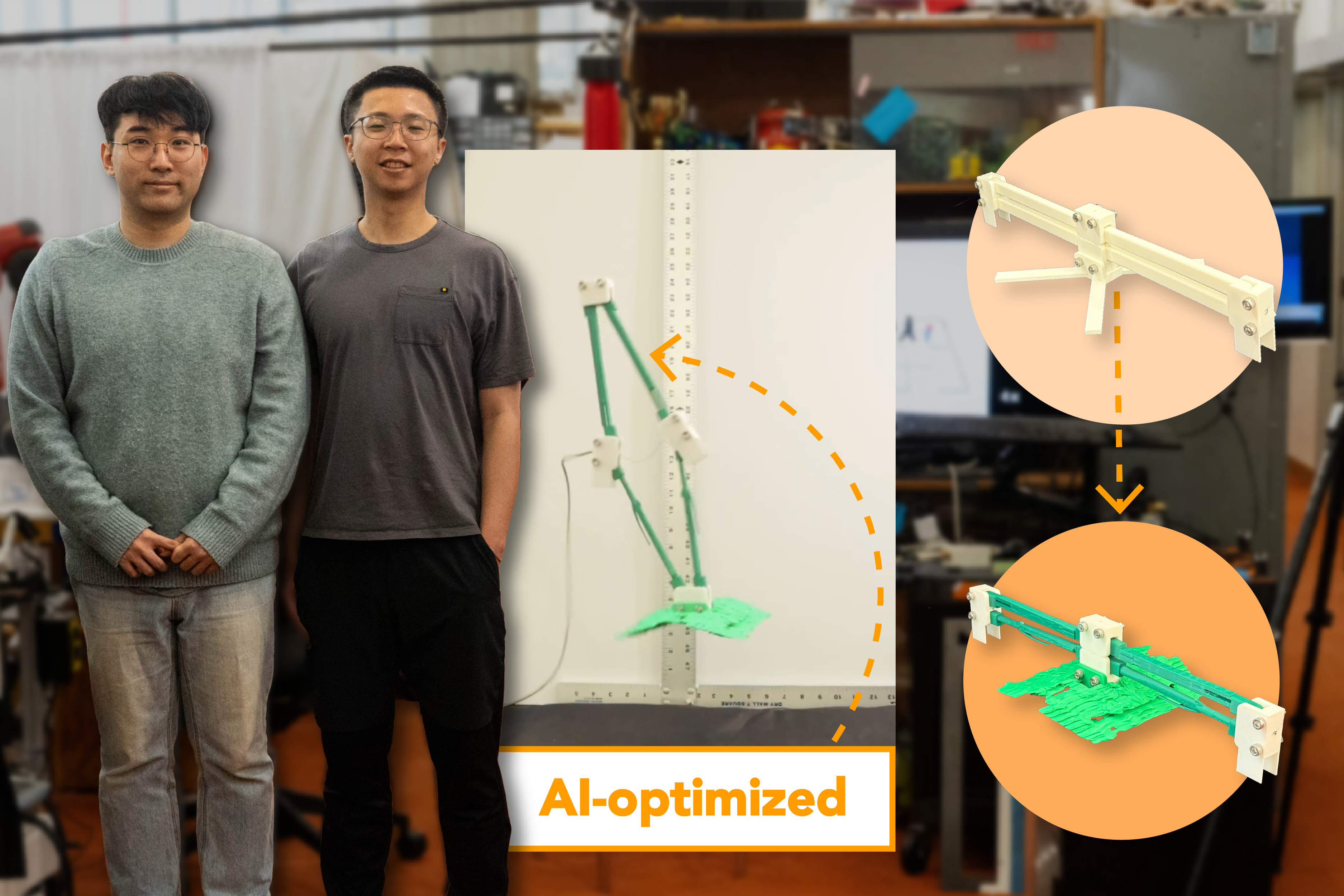
اعتمد الباحثون نهجاً يقوم على استخدام نماذج الانتشار لتحسين تصميم روبوتات قادرة على القفز. بدأ الباحثون بتصميم نموذج ثلاثي الأبعاد للروبوت، ثم حددوا الأجزاء التي يرغبون في تعديلها بواسطة نموذج الانتشار، مع تحديد أبعادها المبدئية. قام الذكاء الاصطناعي التوليدي بتوليد العديد من التصاميم المُحسّنة لهذه الأجزاء، ثم تم تقييم هذه التصاميم من خلال محاكاة افتراضية.
تم استخدام متجه تضمين أولي (embedding vector) لتمثيل خصائص التصميمات المُراد توليدها. تم توليد 500 تصميم محتمل، واختيار أفضل 12 تصميم بناءً على أدائها في المحاكاة. ثم تم استخدام هذه التصاميم لتحسين متجه التضمين، وتكرار هذه العملية خمس مرات لتحسين التصميم تدريجياً. أدى ذلك إلى تصميم مُحسّن تم تصنيعه باستخدام طابعة ثلاثية الأبعاد.
النتائج
أظهرت النتائج أن الروبوت المُصمم بمساعدة الذكاء الاصطناعي تمكن من القفز لمسافة تبلغ حوالي قدمين (60 سم)، أي أعلى بنسبة 41% من الروبوت المُصمم تقليدياً. الاختلاف الرئيسي يكمن في شكل وصلات الروبوت: حيث اتخذت وصلات الروبوت المُحسّن شكلاً مُنحنياً يشبه “عصي الطبول”، على عكس الروبوت التقليدي الذي يتميز بوصلات مستقيمة ومستطيلة.
لم يقتصر الأمر على تحسين قدرة القفز فقط، بل تم استخدام نفس النهج لتحسين تصميم قدم الروبوت لضمان هبوط آمن. أدى ذلك إلى تحسن ملحوظ في استقرار الهبوط بنسبة 84%.
مناقشة النتائج
تتمثل أهمية استخدام نماذج الانتشار في قدرتها على إيجاد حلول غير تقليدية. فعلى سبيل المثال، بدلاً من مجرد تقليل سمك وصلات الروبوت لتقليل الوزن، اقترح نموذج الانتشار شكلاً مُبتكراً يسمح بتخزين طاقة أكبر قبل القفز دون تقليل سمك الوصلات، مما يقلل من خطر الكسر.
الاستنتاجات والتوصيات
أثبت هذا البحث نجاح استخدام الذكاء الاصطناعي التوليدي في تحسين تصميم الروبوتات، مُحققاً أداءً أفضل من التصاميم التقليدية. يفتح هذا النهج آفاقاً جديدة في مجال تصميم الروبوتات، حيث يمكن استخدامه في تحسين تصميم روبوتات مُختلفة، مثل روبوتات التصنيع أو روبوتات المنازل. كما يمكن تطوير هذا النهج بإضافة محركات إضافية للتحكم باتجاه القفز وتحسين استقرار الهبوط، واستخدام مواد أخف وزناً لتحقيق قفزات أعلى في المستقبل.
التمويل
تم دعم هذا البحث جزئياً من قبل برنامج “الحدود الناشئة في البحث والابتكار” التابع للمؤسسة الوطنية للعلوم، وبرنامج “مينز، مانوس وماكينا” التابع للتحالف بين سنغافورة ومعهد ماساتشوستس للتكنولوجيا للبحث والتكنولوجيا، وتعاون معهد غوانغجو للعلوم والتكنولوجيا (GIST) ومختبر علوم الحاسوب والذكاء الاصطناعي (CSAIL). وقد تم عرض هذا البحث في المؤتمر الدولي للروبوتات والأتمتة لعام 2025.






اترك تعليقاً